CN

我們非常重視您的個人隱私秕岛,當您訪問我們的網(wǎng)站時逝遣,請同意使用的所有cookie变硬。有關個人數(shù)據(jù)處理的更多信息可訪問《隱私政策》
以激光SLAM導航為主的復合導航方式可實現(xiàn)托盤AGV復雜路徑的運行屋厘,適用于工廠車間涕烧、普通平面?zhèn)}庫、貨架倉庫的工作環(huán)境,尤其適用在貨架區(qū)域澈魄、出庫緩存區(qū)域等環(huán)境變化較快的場景中景鼠。


準確高效,柔性靈活
基于3D視覺的空間避障技術痹扇,實現(xiàn)對更高高度障礙物的檢測與躲避功能
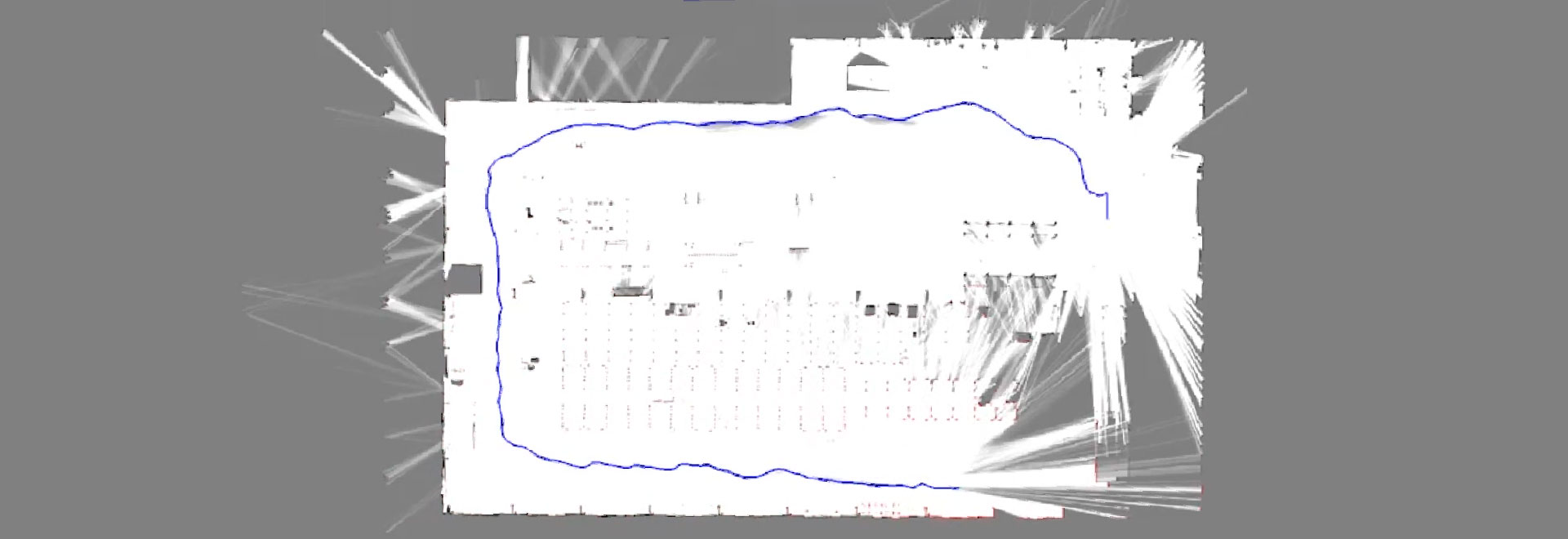
全自動檢測周圍環(huán)境铛漓,當周圍環(huán)境變化率超過20%時,自動更新AGV導航地圖
當激光雷達檢測到周圍環(huán)境變化鲫构,可動態(tài)更新AGV環(huán)境地圖浓恶,顯著降低周圍環(huán)境變化對AGV定位精度的不良影響,大幅提高導航的穩(wěn)定性结笨。

該技術已經獲得多項相關專利沙涎、軟件著作權等自主知識產權證書

蘭劍AGV地面控制系統(tǒng)
AGV和AGV系統(tǒng)

車架及叉車AGV
蘭劍AGV調度系統(tǒng) V1.0

完善您的信息,蘭劍智能專業(yè)團隊為您提供服務刑袒!












.jpg)